深度学习
lcd
微软技术
node
题集
elk
文件
rtmp
线程池
FANUC机器人
AI作画
按键
CountDownLatch
创业项目
开题报告
队列
PMP项目管理
因果AI
防火墙
devexpress
高精地图
2024/4/11 17:02:34
自动驾驶 - 滤波算法
自动驾驶 - 滤波算法
目前比较常用的滤波算法有: 平均值滤波算法 中位值滤波算法 一阶滤波算法 卡尔曼滤波算法
1. 平均值滤波算法
1.1. 算法介绍
平均值滤波算法是比较常用,也比较简单的滤波算法。在滤波时,将N个周期的采样值计算…
记LGSVL Map Annotation(3)利用map annotation生成一个十字路口的opendrive格式地图
参考:b站
1. 创建一个平面 为什么创建平面
2.选择HD map annotaion
MapTR 论文研读
MapTR 论文研读
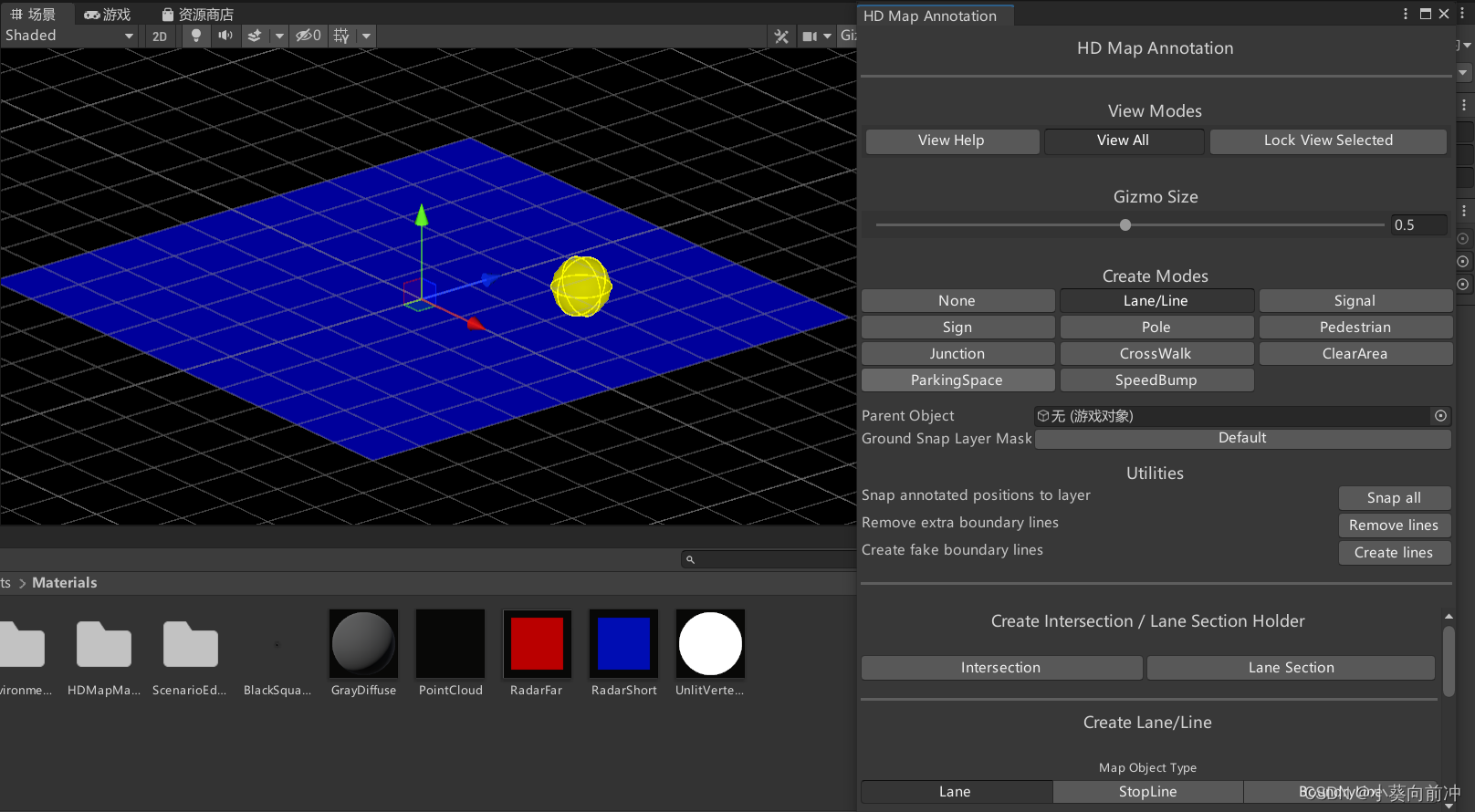
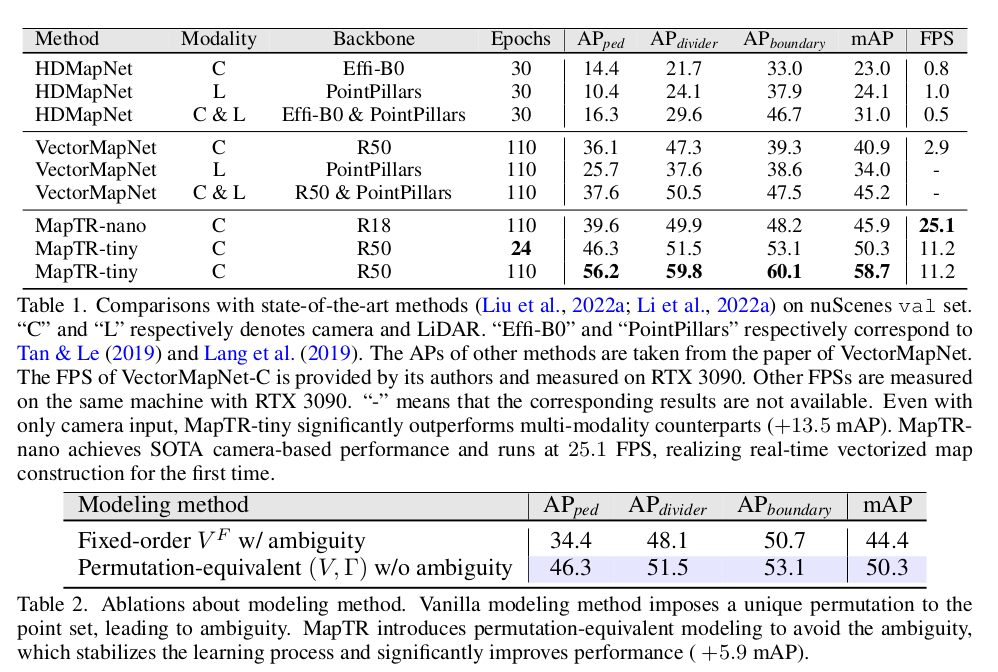
MapTR论文 :https://arxiv.org/pdf/2208.14437.pdf
代码:https://github.com/hustvl/MapTR
MapTR(来自地平线)
1.摘要
作者们提出了一种有效构建高清地图的方法(MapTR),该地图为自动驾驶系统的规划提供丰富且精确的环境信息。这是一种结构化端到端变…
自动驾驶学习笔记(十一)——高精地图
#Apollo开发者#
学习课程的传送门如下,当您也准备学习自动驾驶时,可以和我一同前往: 《自动驾驶新人之旅》免费课程—> 传送门
《Apollo Beta宣讲和线下沙龙》免费报名—>传送门 文章目录
前言
高精地图
地图采集
底图制作
地图…
求直角三角形第三点的坐标
文章目录 求直角三角形第三点的坐标1. 原理2. 数学公式3. 推导过程 求直角三角形第三点的坐标
1. 原理
已知内容有: P1、P2 两点的坐标; dis1 为 P1与P2两点之间的距离; dis2 为 P2与P3两点之间的距离;
求解: …

Lanelets_ 高效的自动驾驶地图表达方式
Lanelets: 高效的自动驾驶地图表达方式 附赠自动驾驶学习资料和量产经验:链接
LaneLets是自动驾驶领域高精度地图的一种高效表达方式,它以彼此相互连接的LaneLets来描述自动驾驶可行驶区域,不仅可以表达车道几何,也可以完整表述车…

论文精读NMP:Neural Map Prior for Autonomous Driving
1 基本背景2 Motivation3 相关研究基于激光SLAM的建图基于学习的语义建图Semantic learning mapping神经表示 4 解决方案4.1 问题说明4.2 局部地图推理local map inference4.2.1 positional embedding4.2.2 地图融合 4.3 全局地图先验更新global map prior update 5 实验5.1 实…
003:高精地图数据采集
摘要:高精度地图数据采集涉及多个环节和技术,需要严谨的规划和执行,以确保采集到的地理信息质量可靠、精准,并能够支持各种智能交通和导航应用的需求。 一、设备准备
高精地图数据采集需要高精度的设备,如Lidar&#…